


KUKA机器人的坐标系可分为四种:
JOINT坐标系统 : 每个设备轴线在正负方向上可以单独移动。
WORLD坐标系统 :固定的,直角坐标系统其原点位于设备的底座。
base坐标系统 :直角坐标系统其原点位于所加工的工件上。
TOOL坐标系统 :直角坐标系统,其原点位于工具上。
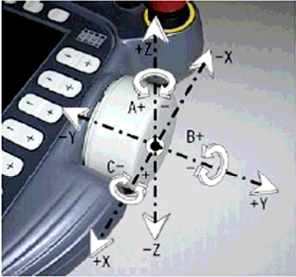
KUKA机器人微动模式的选择可分为两种:
参考坐标系只能在微动模式下改变。
在左上角显示的“Jog mode”(微动模式)状态键必须显示“Space mouse手轮”或者“Jog keys微动键”
选择所需求的坐标系---重复按下下图所指示KCP上的状态键直到出现所要求的坐标系符号为止。
JOINT坐标系统
在JOINT坐标中,每一机械轴线可以单独在轴线的正负方向移动。可以使用微动键或手轮。 手轮允下列微动键/手轮的运动能使每个轴线单独移动。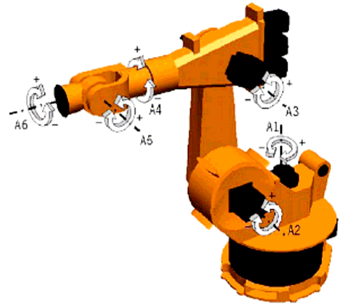

WORLD参考坐标轴系统是**坐标(固定不变),直角坐标,笛卡儿坐标系,其原点一般于工件内部。当设备移动时参考坐标系的原点保持在同一位置,既不随设备移动而移动。 在交货时,WORLD 坐标系原点位于设备的底座上。
base坐标系
base 坐标系是直角坐标,笛卡儿坐标系,其原点位于外部工具。例如:可能 是焊枪。如果你已经选择了此系统作为参考坐标系,设备运行与工件轴线平行。base 坐标系只有在下面情况下移动:工件固定在与算术关联的外部运动系统上交货时,base坐标系原点位于设备的底座上。
TOOL坐标系
TOOL坐标系是直角坐标,笛卡儿坐标系,其原点位于工具上。坐标系一般X轴定向与工具工作方向一致。
TOOL坐标系不断地跟随工具的运动。
货时,TOOL的坐标系的原点位于设备凸缘的中心
了解更多:库卡机器人
