


当您机器人所有轴运行到角度0°时,如果呈现过如下姿态,说明零点已经出现偏差。

错误的零点位置,将直接影响工具TCP的精准性,进而影响程序轨迹。
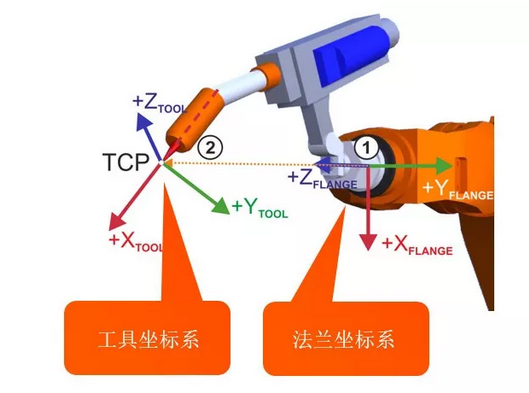
由法兰坐标系为基础计算得来。
零点位置精准则工具坐标系也精准,反之亦然。
TCP精度影响直线、圆弧、样条曲线等轨迹精度。
精准零点校正不仅保证机器人程序轨迹的一致性,同时保证定位精准机器人或高精度机器人的精准精度。
零点校正三原理
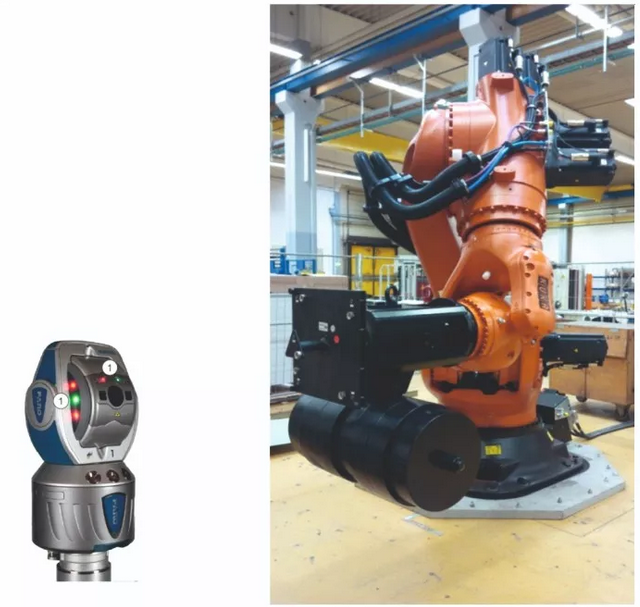
1、机器人各轴上的零点探头到达零点标记槽。(人工操作)

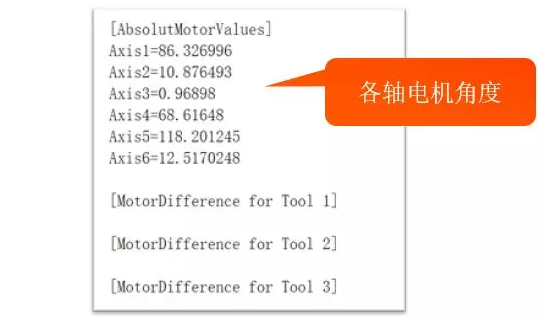
2、机器人设定各轴的角度。各轴校零角度由变量 $MAMES[] 决定。(机器人系统自动完成)

3、记录校零当前电机角度。(机器人系统自动完成)
特别提示
零点校正需要借助工具千分表或者 KUKA EMD

某些型号机器人A6轴没有安装零点探头,校零点时需要对齐刻线,用“参考法”校零。
了解更多:库卡机器人
